UXO risk mitigation

Jump to
Expertise
Onshore project? Working at sea? Partner with Fugro to unlock the secrets of the land or marine environment and get a clear picture of potential hazards. Our unexploded ordnance (UXO) risk mitigation services give you a complete understanding of any hazards at your project site. That way, you’ll minimise risks, avoid unforeseen situations, and overcome any challenges.

Martin Valk
Global lead - UXO risk mitigation services
Benefits
Streamline operations
With an optimised UXO survey and identification approach and complete risk mitigation solution.
Minimise false positive potential UXO targets
Through higher resolution data and an efficient identification process.
Improve schedule control
And reliability through reducing the need for costly and time-consuming identification and target dredging.
Lower HSSE exposure
And CO₂ consumption by minimising the number of offshore personnel required and using onshore remote operations centres.
Key figures
global marine projects
where we've mitigated UXO risk
phases
we can support within the UXO risk mitigation process
potential UXOs
we have inspected

Case study
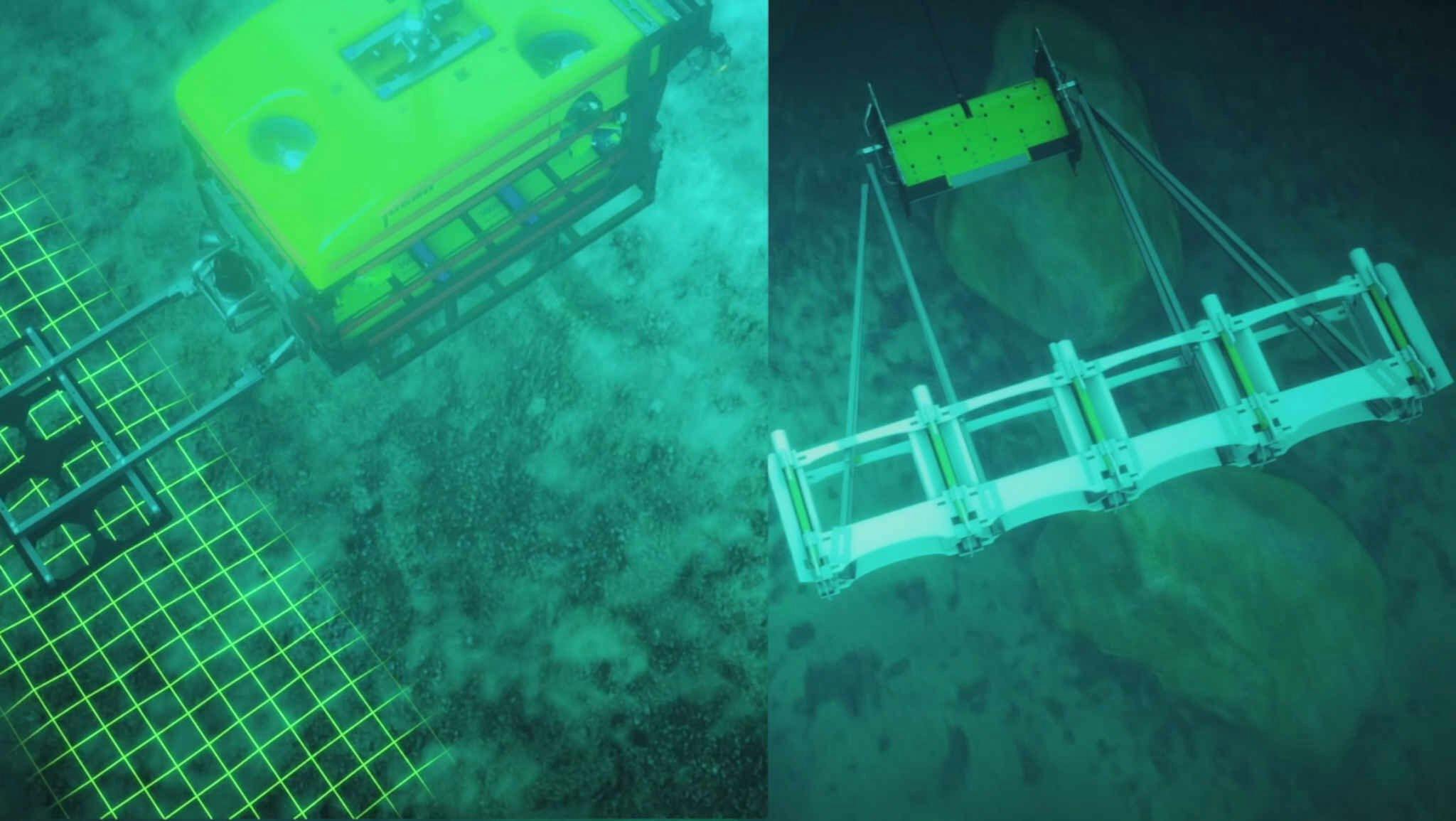
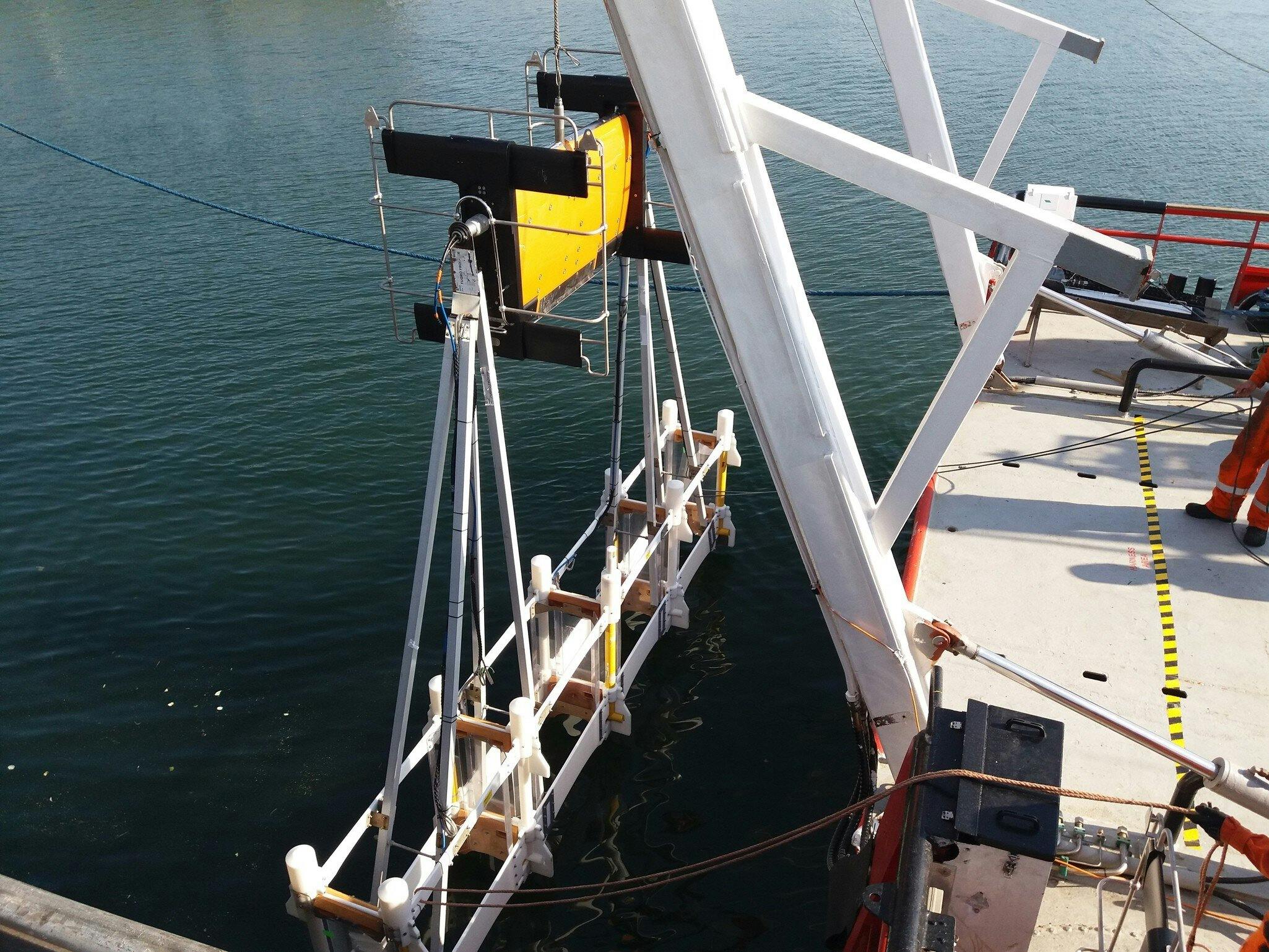
First Sea Auk® mission powers through TenneT UXO clearance
Wind farms offshore transmit green energy by way of power cables along the seabed. But to lay them, you need to make sure that the seabed is cleared of all objects, including UXO. We devised efficient clearance solutions: our WaveWalker 1 dynamic jack-up platform and our Sea Auk® shallow water UXO identification and clearance tool.
Case study
Completing the US’ first-ever offshore wind pUXO identification survey
Dominion Energy’s Coastal Virginia Offshore Wind (CVOW) demonstration project was the first wind farm installation in US federal waters to undertake a potential unexploded ordnance (pUXO) identification survey. The project developer, Ørsted, relied on Fugro’s global marine UXO expertise to identify and clear hazards before construction.
Case study
Superior data in UXO survey of important Paris site
When the French Ministry of Defence identified a location for the new command centre for its army, one of the first requirements was an unexploded ordnance safety diagnosis. Historical studies of the site in Paris suggested the possibility of unexploded bombs following allied forces bombardments in 1943.
1 / 3
Related news



Contact us
Get in touch for UXO risk mitigation

Martin Valk
Global lead - UXO risk mitigation services

Mark Richardson
Global lead - UXO risk mitigation services

Vincent van Santen
Regional lead Europe & Africa - UXO risk mitigation services

Dan Matthews
Regional lead Americas - UXO risk mitigation services

Philip Brown
APAC regional lead - UXO risk mitigation services

Pim Voogd
MEI regional lead - UXO risk mitigation services

Come join us
Exciting challenges. Unforgettable experiences. Work that helps create a more safe and liveable world. These are a few of the things you’ll find at Fugro. Will you join our global team?